Mechanical Design of a Continuum Robot for Deep Orbital Interventions
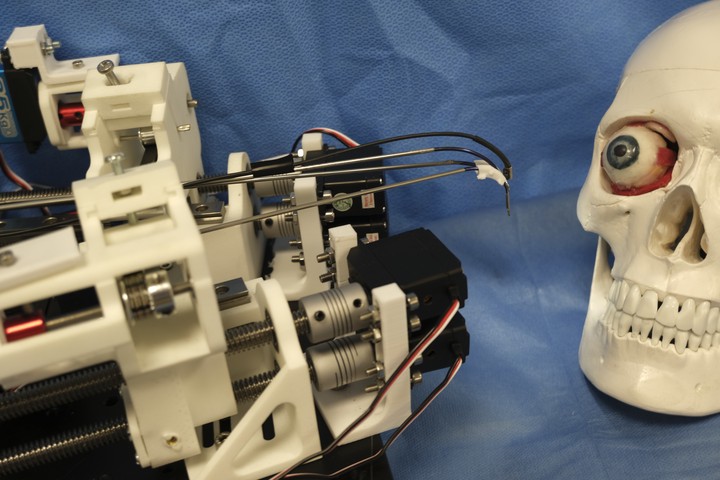 Photo by Zisos Mitros
Photo by Zisos MitrosThis project is on the development of the first medical robotic system for Optic Nerve Sheath Fenestration (ONSF) and generally deep orbital interventions. ONSF is a currently invasive ophthalmic surgical approach that can reduce potentially blinding elevated hydrostatic intracranial pressure on the optic disc via an incision on the optic nerve. We have developped a prototype as a proof of concept. The prototype is a multi-arm system capable of dexterous manipulation and visualization of the optic nerve area, allowing for a minimally invasive approach. Each arm is an independently controlled concentric tube robot collimated by a bespoke guide that is secured on the eye sclera via sutures. In this work, we consider the robot’s end-effector design in order to reach/navigate the optic nerve according to the clinical requirements of ONSF. A prototype of the robot was engineered, and its ability to penetrate the optic nerve was analysed by conducting ex vivo experiments on porcine optic nerves and comparing their stiffness to human ones. The robot was successfully deployed in a custom-made realistic eye phantom. Our simulation studies and experimental results demonstrate that the robot can successfully navigate to the operation site and carry out the intervention.
Below you can see the video that explains our IROS/RAL 2020 publication titled “Optic Nerve Sheath Fenestration with a Multi-Arm Continuum Robot”. It describes the developement of the robot prototype for the currently risky and sparingly carried out procedure of Optic Nerve Sheath Fenestration (ONSF). Our designed and engineered robot is evaluated on a bespoke phantom of the human eye, as well as on ex vivo tissue.
Zisos Mitros, PhD
Mechatronics Development Engineer
Zisos’ research interests include robotics, mechanical design and modelling and control.